発電機の運動方程式および機械的慣性特性
電力系統には慣性があるといわれます。慣性は機械的な述語ですね。 発電機には回転してい
るロータの慣性があり、そして複数の発電機の集合体が系統ですから系統にも慣性があるとい
えるのです。 複数の発電機が並列されて運転されると各発電機が同じ速度で回転しようとす
る同期化力もあります。これも慣性に伴う性質です。 今回はこのような系統の機械的特性と
電気的特性を結び付ける視点に立って解説をしていきます。
 34.1 発電機の運動方程式(Kinetic Motion Equation)と機械定数
34.1 発電機の運動方程式(Kinetic Motion Equation)と機械定数
発電機ロータは図 34.1のように直径
D(= 2R) ,有効軸長
G と見なすことができます。 今、回
転角速度
ωm で回転中のロータに
ΔP = Pm - Pe の加速パワーが加えられるとすると力学的に
dωm/dt の加速度が生じて次式が成立します。


 GD2
GD2 は ロータの体積を表現する実用的な指標であって、定格出力
Prate(MW) および
Nrate (定格回
転数)と共に個々の発電機の銘板に記載される重要な仕様であり、いわば発電機の体格を示す重
要な仕様事項です。
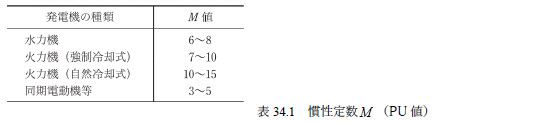
慣性定数
M 値はもちろん電力システムの安定な運転限度を左右する重要な指標です。
M 値は
GD2 と
N2rate.
に比例するので、体積の大きい発電機ほど大きくなります。典型的な M 値を表
Table 13.1 に示します。同一容量の火力機と水力機を比較すると水力機の方が
GD2 は大きくなり
ます。しかしながら火力機回転速度 rotating speed
Nrate (3000/3600 rpm) は水力機の回転速度(= n,
where
2n is the number of poles of hydro-generators)より 3–10 倍大きいです。 従って、一般に火力
機の方が
GD2 が小さくても
M 値は水力機より少し大きくなります。原子力機の場合は火力との
対比でその直径
D は略1.5 倍なので
GD2 は大きいですが、その回転速度が火力機の半分 (4 pole
machine with
Nrate = 1500 or 1800 rpm) なので火力機と大差ない
M 値となります。
さて、発電機の慣性定数
Mm に関連して様々な機械定数を羅列しました。物理的な原理を理解
するためだけであれば式(34.1)だけを提示して先に進めばよいのですが、発電機のSpec とし
て理解するために式(34.2)(34.3a,b,c)で機械的諸定数を関連付けて紹介したわけです。
34.2 発電機の運動方程式(Kinetic Motion Equation or Mechanical acceleration Equation)
発電機の運動方程式は式(34.1)の通りですが、実際のロータには
n 対の
NS 極が配置されてい
るのでこの式を電気式として表現するためには次のような変数の置き換えが必要です。
発電機の pole 数を
2n として、機械的な変数
Θm,
ωm を電気的な変数
Θe,
ωe に置き換えます。

通常の解説書ではこの式を出発点として解説していますね。
M は既に PU 化された値とし
て表1 のようになるわけです。式中の変数
P, Θ, ω は過去の連載において、発電機の PU 化し
た電気式として登場した変数にほかなりません。すべての変数は任意の瞬時において成立して
いるので各変数が瞬時値で或ることを強調して
(t) を付しています。 定常現象にも過渡現象に
も成立する式であるわけです。
式(34.5)は次のようなことを示しています。 原動機から受け取る機械入力
Pm と電気出力
Pe
が平衡状態
(Pm = Pe) であれば回転速度は一定
(dω/dt = 0) であり、また電気出力(負荷の大小で
決まる)が上回れば
(Pm < Pe) ロータの回転が減速し、下回れば
(Pm > Pe) 加速します。 また、
発電機が一定の回転速度
ω0 = 2πf0 で運転中であるとして、
Pm あるいは
Pe が急変すれば回転速度
も変動を強いられることになります。
 34.3 発電機の運動方程式と皮相電力の関係
34.3 発電機の運動方程式と皮相電力の関係
さて、発電機の運動方程式(34.5)を既に学んできた皮相電力の式と関連付けてみましょう。
なお、以下の式は PU 化した式であり、変数は全て PU 値ですが upper-bar は省略します。
発電機のステータ端子電圧を
dq0 領域で表した Park 式(24.1)および皮相電力を
dq0 領域で
表した式(29.17a,b)を新しい式番で再録します。


ロータが原動機から受けとるパワー
Pprimemover(t) とロータが放出するパワー
Protor(t) からステータ
コイルの Joule 熱パワー
Pjoule(t) を差し引いたパワーが電気出力
P3φ として系統に供給されること
を意味しています。ロータが加速あるいは減速するのはロータのパワー
Pprimemover(t) (あるいは
蓄積エネルギー

)の授受の結果であるといえますね。
原動機から受け取るパワー (
Pprimemover(t) は control-valve(guide vane) の開閉制御によって増減し
ます。
Protor(t) は定速運転中はゼロ
(Protor(t)=0) ですが、ロータの加速(減速)に伴てパワー
を放出(吸収蓄積)することになります。 パワーの放出(または吸収)によって回転エネルギー

が増加(減少)します。
Te は電気トルクです。
P=T.ω の関係があるので式
(34.9a)の右辺第1 項の {} の中はロータの電気トルク

に相当します。
Pjoule(t) は ステータコイルの抵抗熱損失として消費されるパワーです。
さて、ここまで説明してきた式は発電機の過渡状態でも成り立つ瞬時式です。 しかして、三
相平衡な定常運転状態では
dq0 領域電気量
ψd,ψq や
id,iq 等は全て時間的に変化しない直流量で
ありその微分項はゼロでしたね。そして微分項
(dψd/dt, dψ0/dt, dψq/dtなど)はゼロです。
したがって定常状態では
Pprimemover, Protor, Te は全て直流量(sign 波形のように時間で脈動しない)
であることになりますね。
Pprimemover, Protor, Te は三相平衡な定常状態ではそれぞれ一定値というわ
けです。 蛇足ですが、No.29 では、交流の電力瞬時値は
Pe(t), Qe(t) は180 度ピッチの正弦波がオフセットした波形として時間的に変
化すると解説しました。電気出力パワーは周期変化するのに機械パワーは一定です。定常運転では
シャフトの周期的捻じれ応力を回避できるわけです。
次に、式中のロータの電気回転角速度
ωe(= n.ωm と系統の
ω=2πf について一言しておきま
す。両者は定常状態では一致していますが、何らかの理由で原動機側or 系統側の状態が少しで
も変化すれば両者の差、いわゆるPower swing が生じます。ただしその差を補うように同期化力
が働いてロータの
ωe(= n.ωm が系統の
ω=2πf が追従します。同期化力のおかげで複数の発電
機が同期を保って安定に運転できますがそれには限界があります。
定態安定度限界です。次回
はその同期化力や定態安定度などの話を続けます。
(2022年10月16日 長谷良秀 記) 